MATEKSYS Crossfire to PWM Converter - CRSF PWM C
Out of stock
SKU
4676
₹944.35
The MATEKSYS CRSF PWM C is a Crossfire to PWM Converter with 2 UARTS and 10 PWM Outputs. This converter supports any Crossfire Protocol receivers, such as the 433MHz, 868MHz, 915MHz, or 2.4GHz.




-
The MATEKSYS CRSF PWM C is a Crossfire to PWM Converter with 2 UARTS and 10 PWM Outputs. This converter supports any Crossfire Protocol receivers, such as the 433MHz, 868MHz, 915MHz, or 2.4GHz.
VIDEO: JB rants about CRSF to PWM converter for ELRS. Matek delivers!
Features
- Compatible with Crossfire Receivers Only
- No 5V Regulator Built-in
- Built-in Current Sensor
- Failsafe Value AutoSet
- Firmware Upgradeable
- 10 PWM Outputs
- 2 UARTS
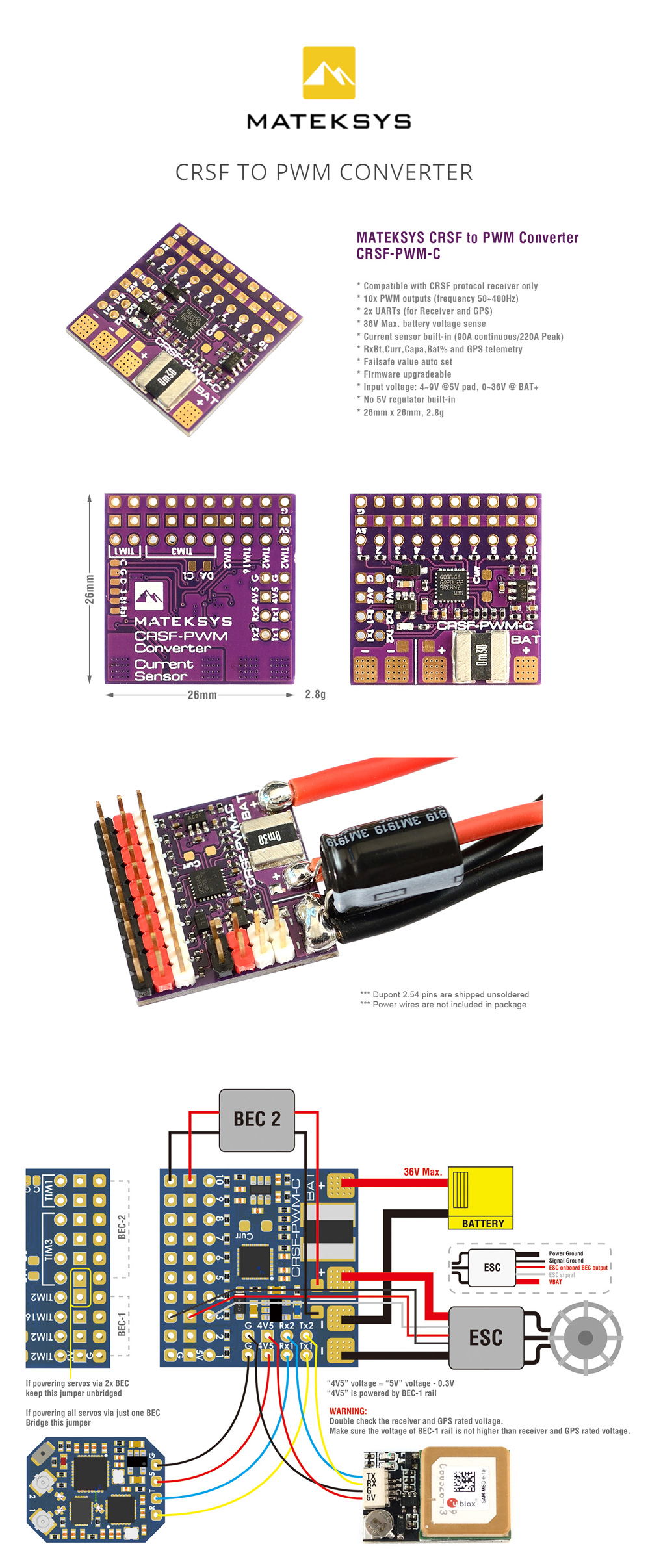
PINOUTS AND PADS
- 4v5 pad voltage = 5V pad voltage -0.3V, make sure the voltage on the 5V pad is not higher than receiver and GPS rated voltage.
- Tx2/Rx2(UART2) for GPS/firmware update/setting parameters
- Tx1/Rx1(UART1) for CRSF protocol Receiver
- Vbat: Battery voltage sensing (0~36V)
- Curr: current sensor signal (0~3.3V)
- 1~10: CH1~CH10 PWM outputs
- G: ground
FAILSAFE
- Failsafe value is set automatically after the CRSF-PWM board is powered on and receives the CRSF signal. LED blinks 8 times quickly.
- Failsafe value = The PWM value of each channel(except CH3) when the CRSF signal is received by the CRSF-PWM board for the first time
- CH3 is specially arranged for the throttle, Failsafe value = 988 by default.
- Put the throttle joystick to the lowest point, put AIL(Roll), ELE(Pitch), RUD(Yaw) middle before powering on the receiver.
LED STATUS
- Slow blinks: CRSF-PWM board doesn’t receive a CRSF signal, e.g., the receiver is not bound with the transmitter, the receiver is not connected to UART1 of the CRSF-PWM board.
- 8x quick blinks: CRSF-PWM board received CRSF signal and failsafe value is saved.
- 2x slow blinks between 8x fast blink and solid on: CLI mode is active
- solid ON: CRSF-PWM board and receiver are working normally
GPS TELEMETRY
- Troubleshooting for no GPS telemetry, double-check the wiring between GPS and CRSF-PWM board, some u-Blox GPS may don’t output NMEA protocol, you need to be reverted GPS to the default configuration in u-center.
- Sensors(GPS, GSpd, Hdg, Alt, Sats) will blink in the Transmitter TELEMETRY tab once the CRSF-PWM board has a connection with GPS.
- GPS “TX” to CRSF-PWM board “RX” Single wire half-duplex UART connection, CRSF-PWM board “TX” to GPS “RX” is not essential.
- with OpenTX Telemetry Logging, You can plot your flight path or search the lost plane.
- u-Blox series GPS can output the “0+1 – UBX+NMEA” protocol by default
- Compatible with GPS NMEA protocol, 1Hz, Baud 9600~115200
- Support GPS Telemetry ID: GPS, GSpd, Hdg, Alt, Sats
TIM & PWM FREQUENCY
- PWM frequency on all 10x Channels can be configured according to TIM
- PWM runs at 50Hz by default
- TIM3: CH5, CH6, CH7, CH8
- TIM2: CH1, CH2, CH4
- TIM1: CH9, CH10
- TIM16: CH3
CLI MODE
- If the CRSF-PWM board doesn’t detect GPS connected to UART2 within 10 seconds after powering on, CLI mode will active.
- After CLI mode is active, the CRSF-PWM board can be connected to the configurator via USB-TTL module/FC passthrough.
- CLI mode has no effect on receiver CRSF signal and PWM outputs
- In CLI mode, CRSF-PWM board firmware can be updated
Specifications
- Support: Any CRSF protocol receivers (including 433MHz, 868MHz, 915MHz, 2.4GHz)
- Current sensor: Built-in (90A continuous /220A Peak), current scale = 150 by default
- Telemetry ID: RxBt, Curr, Capa, Bat%, GPS, GSpd, Hdg, Alt, Sats
- PWM frequency configurable (50Hz default, 100,160,330, 400Hz)
- 36V Max. battery voltage sense (1K:10K voltage divider built-in)
- Rated voltage: 4~9V @5V pad, 0~36V @BAT+
- Vbat and Current sensor scale configurable
- UARTs (for Receiver and GPS): 2
- Size: 26mm x 26mm
- PWM outputs: 10
- Weight: 2.8g
Includes
- 1x MATEKSYS CRSF-PWM-C Converter
- 1x Low ERS Capacitor
- 1x Dupont 2.54 Pins
| Brand | MATEK |
|---|
Write Your Own Review
Customer Questions
Who Viewed This Also Viewed


ORIGINAL Matek HUBOSD Eco X-Type W/XT60
Special Price
₹1,148.73
Regular Price
₹1,366.40






KO METHOD F 2307.5 2540KV
Special Price
₹2,241.01
Regular Price
₹2,560.09

